3D Model Retrieval using Accurate Pose Estimation and View-based Similarity
Abstract
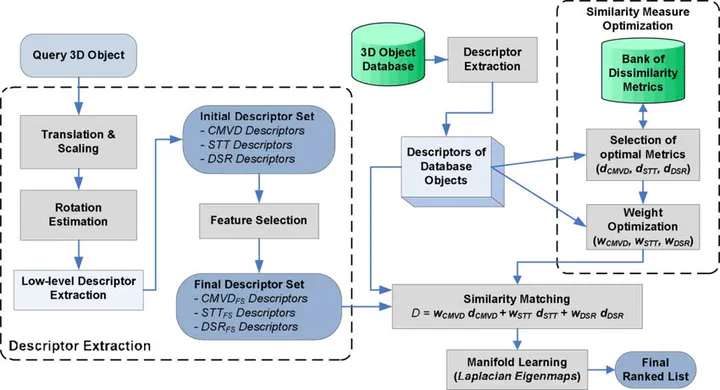
In this paper, a novel framework for 3D object retrieval is presented. The paper focuses on the investigation of an accurate D model alignment method, which is achieved by combining two intuitive criteria, the plane reflection symmetry and rectilinearity. After proper positioning in a coordinate system, a set of 2D images (multi-views) are automatically generated from the 3D object, by taking views from uniformly distributed viewpoints. For each image, a set of flip-invariant shape descriptors is extracted. Taking advantage of both the pose estimation of the 3D objects and the flip-invariance property of the extracted descriptors, a new matching scheme for fast computation of 3D object dissimilarity is introduced. Experiments conducted in SHREC 2009 benchmark show the superiority of the pose estimation method over similar approaches, as well as the efficiency of the new matching scheme.
Type
Publication
1st ACM International Conference on Multimedia Retrieval (ICMR2011), April 17-20, Trento, Italy